

The Hollow Rotating Platform is an essential component in various industrial applications, such as wind turbines, solar tracking systems, and satellite dishes. This paper aims to explore the precise control techniques of the Hollow Rotating Platform, discussing its working principles, challenges, and recent advancements. The focus is on the development of a control system that ensures optimal performance and efficiency while minimizing errors and disturbances.
1. Introduction
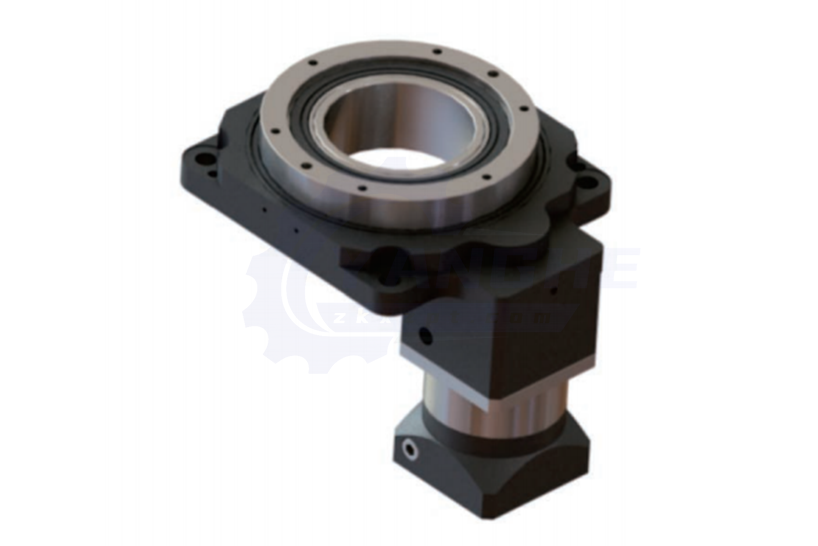
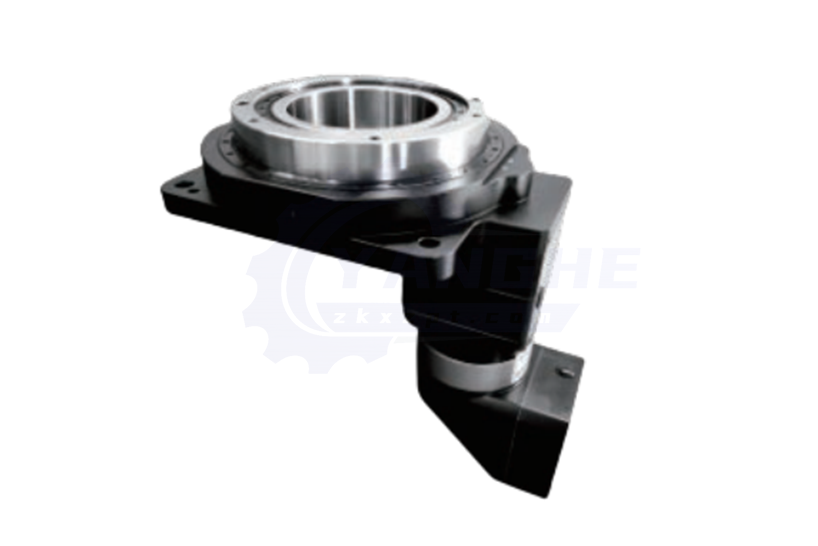
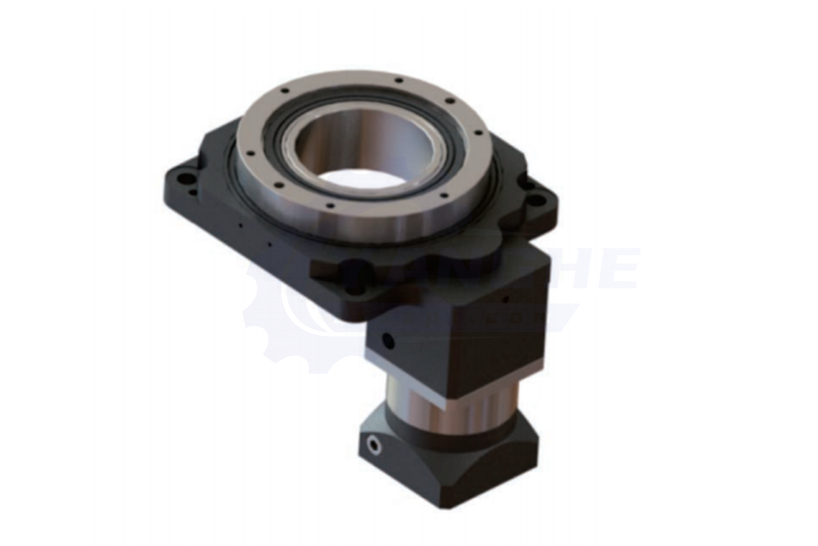
The Hollow Rotating Platform is a type of rotary actuator that allows the rotation of a heavy load with minimal effort. It consists of a central hollow shaft, a series of rollers or bearings, and an outer ring. The load is mounted on the outer ring, and the rotation is achieved through the interaction of the rollers or bearings with the central shaft. The platform can be either motor-driven or manually operated, depending on the application requirements.
2. Working Principles
The Hollow Rotating Platform operates on the principle of rolling contact. The load is transferred from the outer ring to the central shaft through the rollers or bearings. The rotation of the platform is then achieved through the rotation of the central shaft, which is either manually or motor-driven. The rolling contact between the rollers or bearings and the central shaft ensures a smooth and efficient rotation with minimal friction.
3. Challenges
One of the main challenges in the control of Hollow Rotating Platform is to ensure precise and stable rotation. This requires the development of a control system that can accurately measure the position and speed of the platform and adjust the input torque accordingly. Additionally, the platform may encounter external disturbances, such as wind and gravity, which can affect its rotation. The control system should be able to compensate for these disturbances and maintain the platform's stability.
4. Precise Control Techniques
Recent advancements in control theory and technology have led to the development of several techniques for the precise control of Hollow Rotating Platform. These techniques can be broadly categorized into two types: model-based control and learning-based control.
Model-based control techniques use a mathematical model of the Hollow Rotating Platform to design a control system. This model takes into account the dynamics of the platform, including its mass, stiffness, and damping properties. The control system is then designed to minimize a performance index, such as the error between the desired and actual rotation angles or the input torque required to achieve the desired rotation.
Learning-based control techniques, on the other hand, do not require a mathematical model of the platform. Instead, they use data-driven approaches to learn the relationship between the input torque and the rotation of the platform. This is achieved through techniques such as reinforcement learning, where a controller iteratively learns to adjust the input torque to achieve the desired rotation.
5. Conclusion
The Hollow Rotating Platform is a critical component in various industrial applications, and the development of accurate control techniques is essential for ensuring its optimal performance. Both model-based and learning-based control techniques have shown promising results in the control of Hollow Rotating Platform, and further research is needed to improve their accuracy and efficiency. The ongoing advancements in control theory and technology are expected to lead to even more effective control techniques in the future.







Phone: 13116878006
Contact: Mr. Wu
Email: muyuzu@163.com